Antes de prosseguirmos com a primeira etapa do estudo de performance na decolagem, é prudente revisarmos alguns conceitos e introduzirmos outros, para facilitar a compreensão do que veremos à frente. Primeiramente, vamos apresentar os conceitos das principais velocidades que são empregadas na fase de decolagem (e que estão igualmente sujeitas a regras de certificação), e abordaremos a questão das diferentes nomenclaturas que caracterizam os comprimentos das pistas – as chamadas “Distâncias Declaradas”.
No tocante à decolagem, os fabricantes devem submeter o avião a uma série de ensaios, para que possam obter a certificação necessária. Nesses ensaios, diferentes velocidades são empregadas e verificadas segundo requisitos específicos. Então vamos lá, revisar algumas que você já aprendeu e apresentar outras. O quadro abaixo resume os conceitos que veremos a seguir.
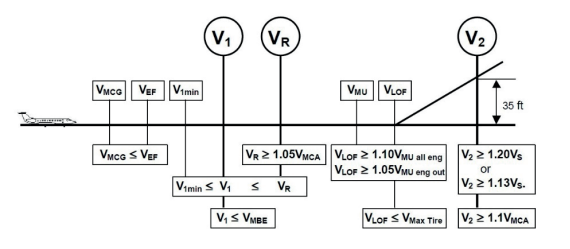
Você já deve ter ouvido falar nas três velocidades que estão destacadas na figura acima (V1, VR e V2). Essas são as velocidades indicadas (IAS) que o piloto utiliza no momento de decolagem, lidas a partir de seu velocímetro. Todas as demais velocidades descritas são utilizadas somente para efeitos de ensaio e de certificação da aeronave, e são apresentadas para que você conheça a relação entre elas e a V1, VR e V2.
Essas velocidades de certificação são necessárias para garantir que as velocidades operacionais sejam seguras do ponto de vista da capacidade de controle, de frenagem e de resistência dos pneus, por exemplo, e são restrições de senso comum. Tome as relações entre a VLOF e a VMAX TYRE: elas existem para garantir que, durante a rolagem da aeronave no solo, não sejam excedidos os limites dos pneus; ou a relação entre a V1 e a VMCG: isso garante que, se um motor falhar perto da V1, o controle direcional poderá ser mantido caso o piloto decida continuar a decolagem, ou retornar para o centro da pista e parar a aeronave, em caso de abortiva; ou ainda a relação entre a VMCA e a V2: isso garante que a aeronave tenha controle direcional adequado, ao sair do solo, mesmo com a inoperância de um dos motores.
Então, qual o significado de cada uma dessas velocidades? Vejamos
As abreviaturas abaixo retratam a terminologia internacional de cada uma das velocidades.
VEF – “Engine Failure Speed”- Velocidade de Falha do Motor:
É a velocidade na qual o motor assumido como crítico torna-se inoperante. Não pode ser inferior à VMCG.
Nota: Motor crítico é aquele que possui maior impacto na performance e controle da aeronave. Num quadrimotor, por exemplo, os motores críticos são os externos.
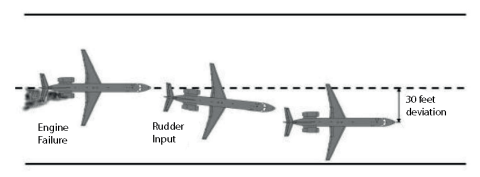
VMCG – “Minimum Control Speed on the Ground”- Velocidade Mínima de Controle no Solo:
É a velocidade atingida durante a corrida de decolagem no solo em que, quando ocorre a falha no motor crítico, se a decolagem é continuada, é possível manter o
controle direcional do avião usando apenas controles aerodinâmicos primários – leme de direção (roda de direção do nariz não é permitida, para efeito de ensaio),
sem se desviar da linha central da pista por mais de 30 pés. Ainda, a força exercida no leme de direção, para manter a aeronave dentro dos limites acima especificados,
não pode exceder 68 Kgf, com os demais motores da aeronave operando em regime de decolagem. A figura abaixo exemplifica um ensaio dessa natureza.
V1 Min – Velocidade de Decisão Mínima:
É a velocidade na qual a aeronave se encontrará, após o piloto reconhecer a falha do motor crítico que ocorreu na VEF, e iniciar a primeira ação para trazer a aeronave para uma parada (abortiva de decolagem).
V1 – “Decision Speed” – Velocidade de Decisão:
É a velocidade na qual a decolagem deve ser continuada, a menos que os procedimentos para abortiva já tenham sido iniciados. Essa é uma velocidade crítica e muito importante de ser compreendida pelos pilotos. Mais à frente, comentaremos sobre as possibilidades de reduzir ou aumentar uma V1 balanceada, quando tratarmos do conceito de “Pista Balanceada / Não Balanceada”, e veremos as vantagens e desvantagens de empregar esse método.
Nota: é procedimento usual que o a V1 seja anunciada pelo PNF (Pilot Not Flying – piloto que não está voando a aeronave) com 5 Kt IAS de antecedência. Dessa forma,
se uma falha de motor ocorrer logo após o anúncio da velocidade, garante-se que a decisão de prosseguir na decolagem será adotada, pois provavelmente a aeronave já deverá ter acelerado os “5 Kt” de diferença e atingido/ultrapassado a V1.
A V1 deve sempre assegurar que:
- A distância de decolagem até se atingir a altura de 35 ft e a velocidade V2 não excederá a distância de decolagem disponível para a pista (no caso de decisão por prosseguir na decolagem, após a perda de um motor crítico); e
- A distância para levar a aeronave a uma parada total não excederá a distância de aceleração e parada disponível para a pista (no caso de decisão por abortar a decolagem, após a perda de um motor crítico).
Por fim, a V1 é dimensionada para garantir que seja:
- Maior que ou igual à V1min;
- Menor ou igual à VR; e
- Menor ou igual à VMBE
VR – “Rotation Speed” – Velocidade de Rotação:
É a velocidade na qual o piloto inicia a ação para elevar o trem de pouso do nariz fora do chão. Não pode ser menor do que a V1 e menor do que 1,05 VMCA.
VMBE – “Maximum Break Energy Speed” – Velocidade de Máxima Energia dos Freios:
É a velocidade mais alta na qual o avião pode ser parado, sem exceder o limite máximo de capacidade de absorção de energia dos freios (a energia cinética do avião é transformada em calor, pelos freios, no processo de frenagem). A V1 não pode exceder a VMBE. Ela é crítica em decolagens com pouco Flape (pois nessa condição o avião precisa de velocidades maiores para decolar), em elevadas altitudes, com elevados pesos de decolagem e na presença de elevadas temperaturas do ar.
VMU – “Minimum Unstick Speed” – Velocidade Mínima com Manche Livre:
É a velocidade na qual, acima dela, a aeronave pode deixar o solo (despegar) com segurança e continuar a decolagem sem mostrar características perigosas. A VMU
é normalmente definida quando o profundor da aeronave tem força suficiente para levar a aeronave para uma atitude em que possa prosseguir na decolagem.
Uma aeronave é definida como de “geometria limitada” quando a sua cauda entra em contato com o solo, antes da atitude necessária para que o profundor gere a
sustentação necessária para retirar a aeronave do solo. Nesse caso, a cauda da aeronave irá derrapar no chão até que acelere a uma velocidade suficiente para
sair do chão. A VMU é ensaiada para as situações de AEO (All Engine Operating) e OEI (One Engine Inoperative).
VMAX TIRE – “Maximum Tire Speed” – Velocidade Máxima dos Pneus:
É a velocidade máxima no solo para a qual os pneus da aeronave foram estruturalmente certificados. Acima dessa velocidade, os limites de resistência dos pneus são excedidos e podem não resistir às forças centrífugas às quais estão sujeitos, pelo giro das rodas.
VLOF – “Lift Off Speed” – Velocidade de Despegue:
Intimamente relacionada com a VR, é a velocidade na qual o avião sai completamente do solo. A VLOF não pode ser menor do que 1.10 da VMU (AEO) ou 1.05 da VMU (OEI), exceto para aeronaves limitadas por geometria, onde a VLOF não pode ser inferior a 1,08 da VMU (AEO) ou 1,04 da VMU (OEI). Além disso, a VLOF não pode ser maior do que a VMAX TIRE.
VMCA – “Minimum Control Speed on the Air” – Velocidade Mínima de Controle no Ar:
É a velocidade mínima na qual, quando o motor crítico se torna subitamente inoperante, é possível manter o controle direcional do avião com esse motor
inoperante, empregando uma inclinação máxima de 5 graus em direção à asa do motor operante (para compensar o momento causado pela perda do motor).
O piloto deve observar que a inclinação das asas provoca aumento de carga “G”, o que irá requerer mais potência para manter um voo nivelado, ou provocar
uma redução no gradiente de subida, caso a potência máxima do(s) motor(es) restante(s) já esteja sendo utilizada.
V2 – “Take Off Climb Speed” – Velocidade de Decolagem e Subida:
É a velocidade alcançada na altura de 35 ft sobre a pista, assumindo um motor inoperante e a rotação iniciada na VR.
A V2 é ensaiada para garantir que seja:
- Maior ou igual a 1,1 VMCA;
- Maior ou igual a 1,2 VS para a configuração de decolagem (ou 1,13 Vs-1g / essa velocidade de estol é a VS corrigida para a situação de voo de 1 “G”); e
- Maior ou igual a VR.
Numa decolagem normal, ou seja, com todos os motores em funcionamento, uma aeronave geralmente sobe com velocidade 10 a 15 Kt a mais do que a V2, nos
primeiros segmentos da decolagem.
Nota: a V2 também pode ser utilizada por aeronaves, como parâmetro de segurança para referenciar subidas iniciais em procedimentos de atenuação de ruídos (por exemplo, V2 + 20 Kt, V2 + 25 Kt ou outro valor definido pelo fabricante), até o alcance de uma determinada altitude. Com tais velocidades, inferiores à velocidade normal de subida, obtêm-se maiores gradientes de subida e, consequentemente, atinge-se mais rapidamente uma determinada altitude, minimizando o ruído sobre áreas densamente habitadas.
Para fins de certificação, é importante que você compreenda que a decolagem de uma aeronave é dividida em cinco fases – cada qual com diferentes requisitos, a saber: Distância de Decolagem; 1o Segmento; 2o Segmento; 3o Segmento e 4o Segmento. O maior peso disponível para a decolagem será o MENOR peso obtido a partir das análises de cada uma das fases, ou seja, a fase mais restritiva irá determinar o limite de peso de decolagem. A próxima figura sintetiza tais fases, ao mostrar um Perfil de Decolagem para fins de certificação.
As velocidades que descrevemos há pouco compreendem as fases da Decolagem propriamente dita, e dos 1o e 2o Segmentos. Para a compreensão dos demais Segmentos, vejamos também o conceito dessas duas velocidades abaixo:
VFR – “Flap Retraction Speed” – Velocidade Mínima de Recolhimento dos Flapes:
É a velocidade (ou a programação de velocidades) em que a retração dos Flapes de decolagem deve ser iniciada, durante o 3o Segmento de decolagem, em caso
de falha do motor. A VFR é normalmente definida como V2 + D, onde o “D” é um acréscimo que varia em função da configuração inicial dos Flapes de decolagem.
Para as situações em que todos os motores estejam funcionando (AEO), a VFR é apenas uma referência da velocidade mínima na qual o recolhimento dos Flapes
deve ser iniciado.
VFS – “Takeoff Final Segment Climb Speed” – Velocidade do Segmento Final de Subida:
É a velocidade a ser alcançada ao final do 3o Segmento de decolagem (após o recolhimento dos Flapes), e mantida durante o segmento final de subida ao menos
até 1.500 Ft de altura, com o trem de pouso e Flapes recolhidos, na situação de perda de um motor crítico. Deve ser maior ou igual a 1,25 VS (ou 1,18 Vs-1g).
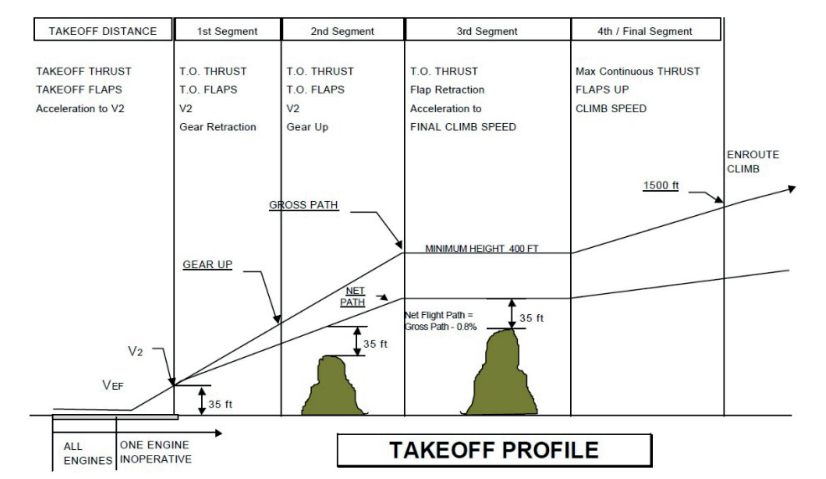
A figura anterior resume um Perfil de Decolagem completo, para efeitos de certificação. Vamos compreender cada uma dessas fases, e dos requisitos que devem ser satisfeitos durante os ensaios de certificação. O perfil completo de decolagem é uma trajetória que parte da aceleração em potência de decolagem dos motores, a partir de uma posição parada, até o ponto em que a aeronave atinge uma altura de 1.500 pés acima da superfície da pista, ou completa a transição para a configuração de subida em rota (em termos de altura), consoante a que for mais alta, a uma velocidade não inferior a 1,25 VS, com um motor inoperante.
A figura a seguir resume as configurações (trem de pouso, Flapes, Potência dos Motores e Velocidade) e os gradientes mínimos de subida (aeronaves com 2, 3 ou 4 motores) para um Perfil de Decolagem, a partir do momento em que a aeronave decola e atinge a V2, e prossegue nos quatro segmentos seguintes (conforme visto na figura anterior).
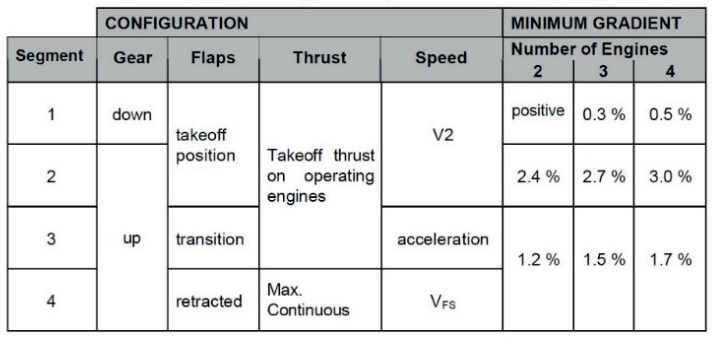
Vamos agora tecer considerações sobre cada uma dessas fases, desde o instante em que a aeronave inicia a rolagem, até o momento em que atinge ao menos 1.500 pés de altura.